
王中林院士《AFM》:柔性可拉伸的纤维状摩擦纳
可穿戴的、柔性的、甚至可伸缩的触觉传感器(例如各种类型的电子皮肤)已引起了广泛关注,它们可以适应复杂和不规则的表面,最大限度地匹配可穿戴设备,并适形地应用于人体器官。然而,如何同时实现透气性、渗透性和舒适性仍是一巨大挑战。一种简单的方法是在电子皮肤上打孔,但这样会影响电子皮肤的韧性。另一种有效的方法是使触觉传感器小型化,并通过编织工艺将小型化传感器集成在一起。摩擦电纳米发电机(TENGs)是一种基于摩擦起电与静电感应的耦合效应将机械能转化为电能的技术。TENGs作为一种新的能量收集方法,具有重量轻、成本低和结构简单等优势。纤维状的摩擦纳米发电机(F-TENGs)可以与人体集成在一起,而不会影响人的正常生活,也可以作为触觉传感器集成到纺织物中。F-TENG可以满足人体对透气性和舒适性的需求,有望替代传统的传感器,为透气、舒适和可穿戴的传感器提供更多机会。
中科院北京纳米能源与系统研究所的王中林院士等人通过将银纳米线/碳纳米管导电材料和封装的聚二甲基硅氧烷有序地沉积到可拉伸的氨纶纤维上,制备了直径为0.63 mm的高度柔性、可伸缩的同轴结构纤维状摩擦纳米发电机。作为一种自供电的多功能传感器,合成的复合纤维可以将机械刺激转换为电信号,而不会影响正常的人体活动。此外,F-TENG可以很容易地集成到纺织品中,作为触觉传感器,可以绘制实时的触觉轨迹和压力分布。这项工作提供了一种新的方法来制造具有高灵敏度和可伸缩性的纤维压力传感器,这种传感器在个人医疗监护和人机交互方面具有广阔的应用前景。该研究以题为“Flexible and Stretchable Fiber‐Shaped Triboelectric Nanogenerators for Biomechanical Monitoring and Human‐Interactive Sensing”的论文发表在《Advanced Functional Materials》上。
【F-TENG的制备】
最近,已有不少研究通过不同的方法制成了各种F-TENG。但是,其中一些方法比较复杂,得到的一些F-TENG直径较大或无法拉伸。该研究中直径为0.63 mm的可拉伸F-TENG是通过三步涂覆方法制成的。图1a示意性地展示出了生产过程。作者首先将银纳米线(Ag NWs)沉积到可拉伸的氨纶纤维基材上。为了进一步提高电导率和稳定性,然后将碳纳米管(CNT)溶液浸涂在准备好的纤维上。CNT覆盖了Ag NW的表面以及它们之间的孔隙。随后通过聚二甲基硅氧烷(PDMS)将复合纤维包封以形成同轴结构。图1b显示了制成的F-TENG的示意图和照片。如图1b中的插图所示,F-TENG在拉伸后可保持完整无损,应变可高达140%,也可以打结并折叠成各种形状。结果表明,F-TENGs具有出色的拉伸性和柔韧性,可以适应各种不规则的表面,并能应用于人体器官,甚至可以织成纺织品。
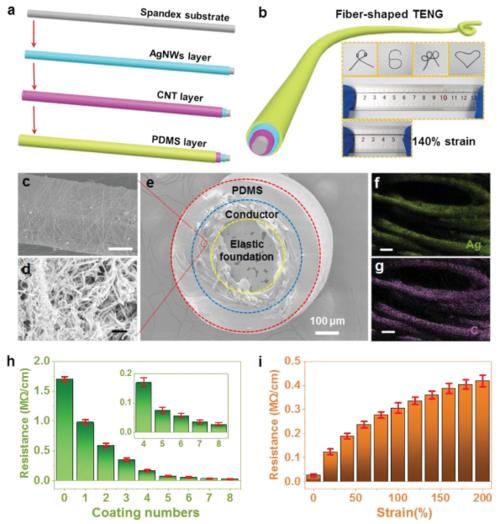
图1?F-TENG的制造工艺,器件结构和电导率
【F-TENG的压力敏感性】
为了研究F-TENG的压力敏感性,作者研究了电输出和加载力之间的关系。如图2a所示,电压和电流随着压力的增加而增加。基于F-TENG的出色灵活性和高感测功能,作者开发了一种自供电的人体运动检测器。因为脚跟可以最大程度地与地面接触,所以将F‐TENG缝在袜子的脚跟上。如图2b所示,当测试仪行走或奔跑时,脚与地面之间的周期性接触间隔会产生周期性的电信号。根据这些电信号,可以了解人体的运动行为并记录步数。此外,作者将F-TENG安装在手腕上。弯曲手腕时,F-TENG与皮肤接触或分离(图2c),每个输出周期对应于手腕的一个弯曲周期。F-TENG也可以监控手的动作,图2d显示了在不同弯曲角度下的触觉传感器的电压输出。通过以上研究,F-TENG可以用于监视人体的运动,这对于机器人技术或智能假肢具有潜在的应用价值。
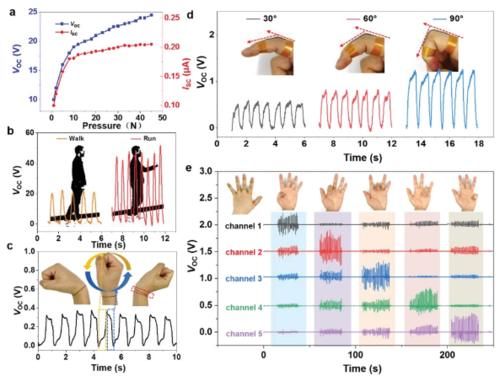
图2?F-TENG的传感功能和生理监测应用
【触觉传感器的制造和应用】
作者制造了基于F‐TENG的触觉传感器(图3a),它结合了F-TENG的传感性能和织物的柔性。如图3c所示,当触觉传感器被触摸时,触觉传感器将产生输出电压信号。然后,通过多通道数据采集方法可以检测到16个通道的实时电压信号。最后,可以通过专门开发的数据分析和处理软件显示实时结果。当手指触摸触觉传感器时,计算机屏幕会实时显示电压信号,通过观察颜色的变化,还可以识别触摸位置(图3d)。因此,该传感器可用于捕获触摸动作的轨迹。此外,该传感器还能实时检测压力分布,如图3e所示。该研究结果表明,基于F‐TENG的触觉传感器有望成为自供电、透气、可靠和舒适电子皮肤的候选对象,在压力跟踪和多点触控设备中具有广阔的应用前景。